Nền tảng chuyển động 6DOF và ứng dụng VNB Việt Nam
Nền tảng chuyển động 6DOF (chuyển động 6 bậc tự do) mô phỏng chuyển động theo 3 trục quay (cao độ, lăn và ngáp) và 3 trục dịch chuyển (dung lên, tăng vọt và lắc lư). Nền tảng này được thiết kế để tái tạo các chuyển động mà một vật thể hoặc phương tiện trải qua theo sáu hướng này, tạo ra trải nghiệm mô phỏng sống động. VNB Việt Nam tập trung nghiên cứu sản xuất các hệ thống chuyển động điện có hiệu suất độ chính xác hiệu quả cao, công nghệ ứng dụng rộng rãi trên thế giới. Trong bài viết này chúng tôi sẽ giải đáp nền tảng chuyển động 6DOF hoạt động như thế nào và chúng tôi hỗ trợ những gì.
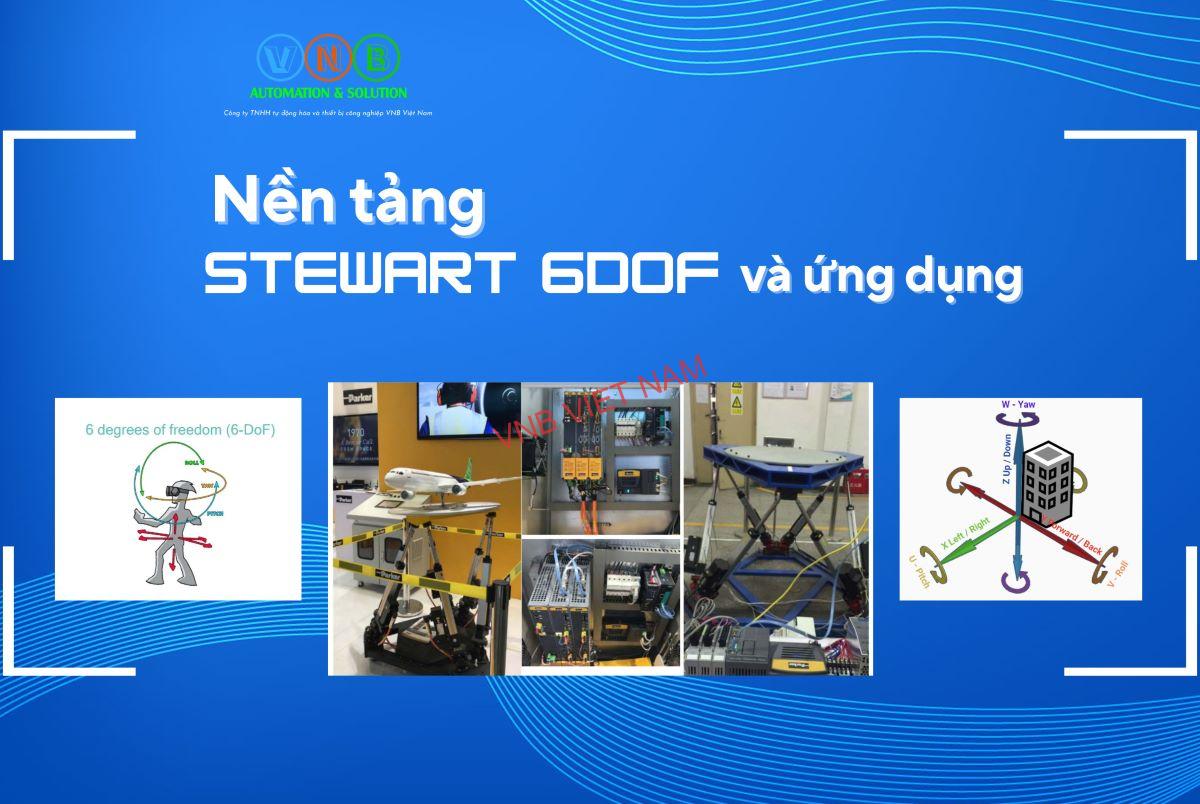
Nền tảng chuyển động 6DOF ứng dụng như thế nào?
Hệ thống chuyển động 6DOF được đánh giá là thuật toán loại bỏ phức tạp nhất Thế giới, các nền tảng chuyển động này cực kỳ phổ biến trong ngành công nghiệp ứng dụng đòi hỏi độ chính xác cao. Nền tảng chuyển động 6DOF (chuyển động 6 bậc tự do) ứng dụng thực tế trong các tổ chức như hàng không vũ trụ NASA của Mỹ sử dụng chúng để đào tạo phi hành gia trong không gian; các hệ thống chuyển động phức tạp được sử dụng trong Bộ mô phỏng chuyến bay, Bộ mô phỏng lái xe cơ giới và Xe đua, Bộ mô phỏng xe tải, xe buýt và thiết bị hạng nặng như xe tăng, tau thủy…, Bộ mô phỏng quân sự và quốc phòng, Bộ mô phỏng nghiên cứu giải trí không gian đa chiều …
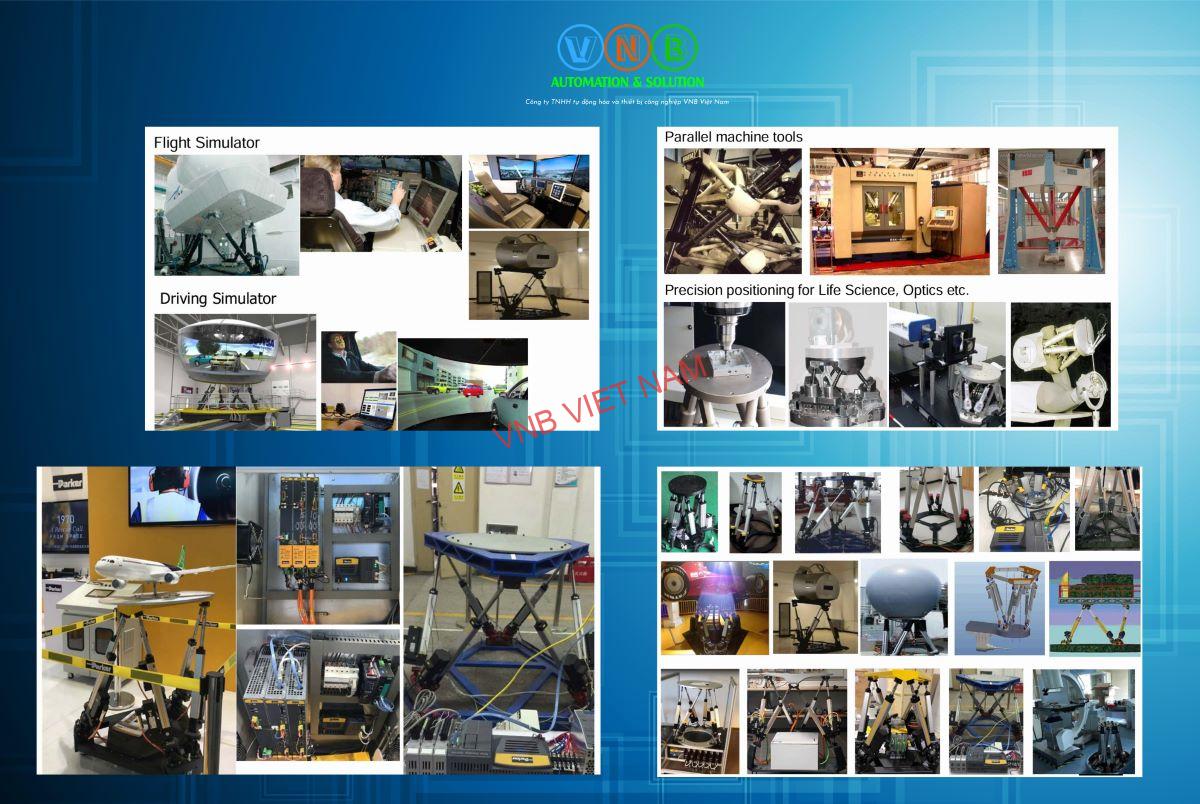
Ứng dụng nền tảng chuyển động 6DOF
Xây dựng trình mô phỏng nền tảng chuyển động 6DOF
Thành phần của hệ thống mô phỏng bao gồm những gì?
Hệ thống giả lập bao gồm: nền tảng chuyển động tự do của Stewart Multi, hệ thống điều khiển máy tính, hệ thống truyền động động cơ, v.v.
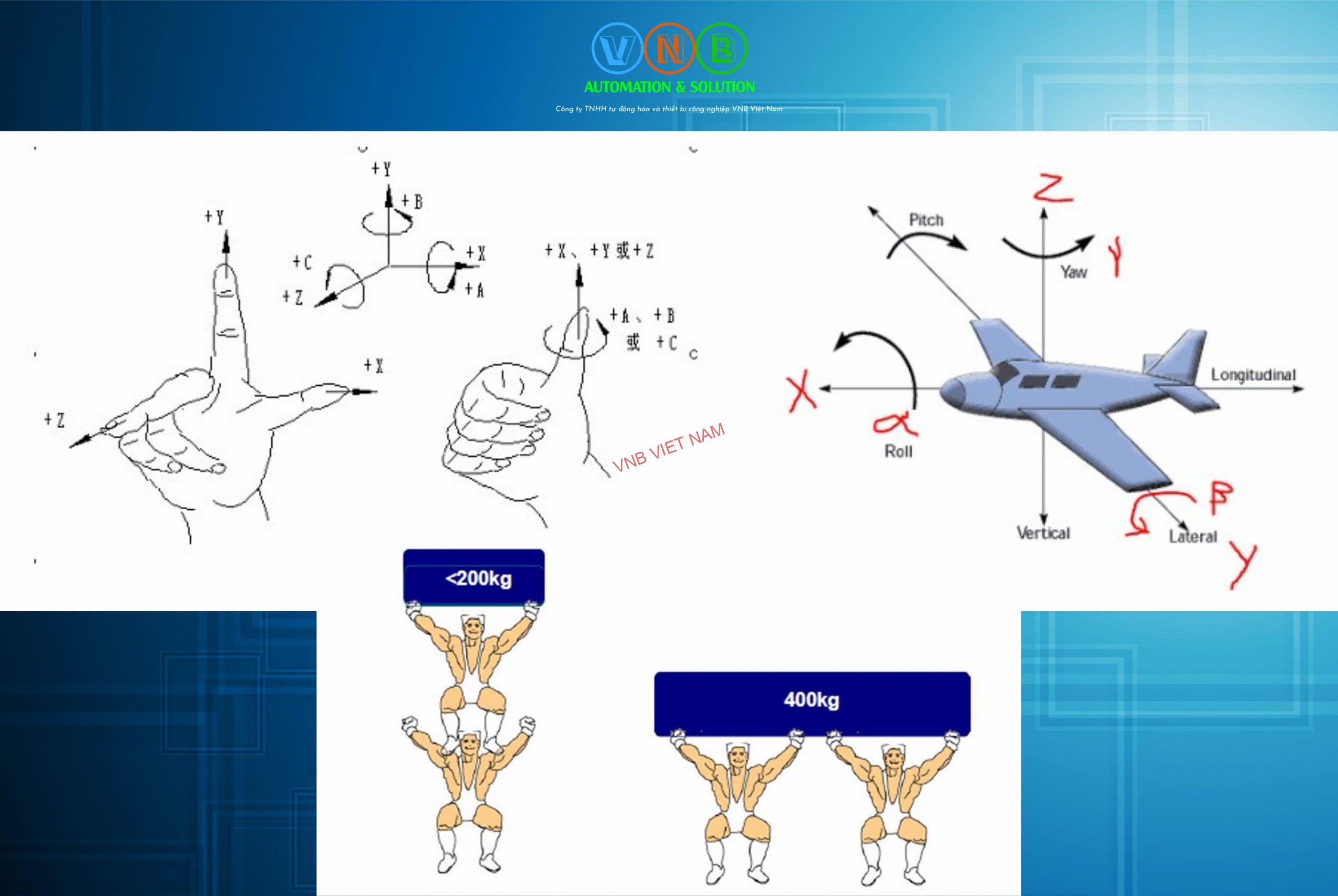
Hệ thống điều khiển máy tính được lập trình để kiểm soát sự cố và tốc độ của các bộ truyền động tuyến tính điện để nhận ra chuyển động tự do đa độ của nền tảng chuyển động trong không gian ba chiều. Cụ thể, nền tảng chuyển động có thể tự do thay đổi vị trí là chuyển tiếp/lùi (tăng), lên/xuống (hốc), dịch bên trái/phải (sway) trong ba trục vuông góc, kết hợp với các thay đổi về định hướng thông qua xoay vòng ba trục vuông góc, thường là được gọi là ngáp (trục bình thường), sân (trục ngang) và cuộn (trục dọc).
Thành phần chính gồm có:
1. Nền tảng chuyển động
Nền tảng phía trên kết nối với cơ chế mô phỏng như buồng lái, ghế lái hoặc tủ bay, v.v.
Đối với các phụ kiện lắp, khớp phổ biến được sử dụng nhiều nhất cho phép xoay lên đến 30 độ. Khớp phổ quát được khớp nối trên kết nối nền tảng hàng đầu với thanh piston của các xi lanh điện và khớp phổ biến có khớp nối thấp hơn kết nối đế đáy cố định với vỏ xi lanh. Đột quỵ, tốc độ và toàn bộ công suất tải của nền tảng có thể được tùy chỉnh dựa trên các yêu cầu của khách hàng.
Nền tảng dưới cùng được gắn vào sàn để cố định.
2. Phần cứng của hệ thống điều khiển máy tính
Đơn vị điều khiển chuyển động: Áp dụng bộ điều khiển servo liên quan đến trình điều khiển động cơ làm máy thu tín hiệu chuyển động để nhận ra sự khởi đầu và tạm dừng hoặc dừng của toàn bộ nền tảng chuyển động.
Hơn nữa, khi nhận được tín hiệu điều khiển được gửi bởi máy tính chủ hệ thống sẽ điều khiển chuyển động của xi lanh điện, theo dõi trình điều khiển động cơ servo và chuyển động của toàn bộ hệ thống điều khiển, xử lý sự cố cũng như bảo vệ an toàn.
Đơn vị quy trình tín hiệu: Để xử lý tất cả các tín hiệu cảm biến liên quan đến toàn bộ hệ thống nền tảng chuyển động, tín hiệu thử nghiệm và tín hiệu I/O kỹ thuật số cũng như lái xe của trình điều khiển servo.
3. Phần mềm điều khiển
Đối với phần mềm máy tính điều khiển chuyển động, có phần mềm điều khiển chuyển động và phần mềm điều khiển logic có thể được điều khiển bằng cách đơn giản là kết nối với máy tính.
Tín hiệu hành động sẽ được gửi đến bộ điều khiển được kết nối với xi lanh điện để làm cho trình điều khiển kích hoạt các xi lanh điện để mở rộng và rút lại, có thể nhận ra mô phỏng sinh động.
Xem thêm: Hệ thống IIoT – cập nhật xu hướng mới trong sản xuất công nghiệp
Cơ chế nền tảng chuyển động 6DOF
- Cơ chế nối tiếp điển hình
- SCARA 3 khớp
- 6 Robot có khớp nối
- Cơ chế song song điển hình (P.M.)
- Chân máy 2DOF, Chân máy 3DOF (Robot Delta)
- Stewart 6DOF
Ưu điểm của việc sử dụng nền tảng chuyển động 6DOF so với nền tảng chuyển động 2DOF hoặc 3DOF là gì?
Nền tảng chuyển động 6DOF cung cấp những ưu điểm vượt trội hơn so với nền tảng chuyển động 2 DOF và 3 DOF, đặc biệt là về mô phỏng thực tế và sự trải nghiệm người dùng.
So với nền tảng 2 DOF, nền tảng chuyển động 6 DOF cung cấp mô phỏng thực tế và phức tạp hơn, cho phép chuyển động ở tất cả sáu bậc tự do bao gồm dịch chuyển theo trục x, y và z, cũng như các chuyển động quay theo bước, trục cuộn và ngáp. Điều này cho phép thể hiện chính xác hơn các chuyển động và môi trường trong thế giới thực phù hợp ứng dụng mô phỏng và huấn luyện tiên tiến, chẳng hạn như các ứng dụng trong ngành quân sự và vũ trụ.
Ưu điểm của cơ chế song song
Cơ chế song song có độ cứng hơn và bền hơn về cấu trúc, do đó hoạt động mạnh mẽ hơn và khả năng tải trọng cao hơn.
Sai số trong cơ chế song song có xu hướng trung bình nên độ chính xác cao hơn.
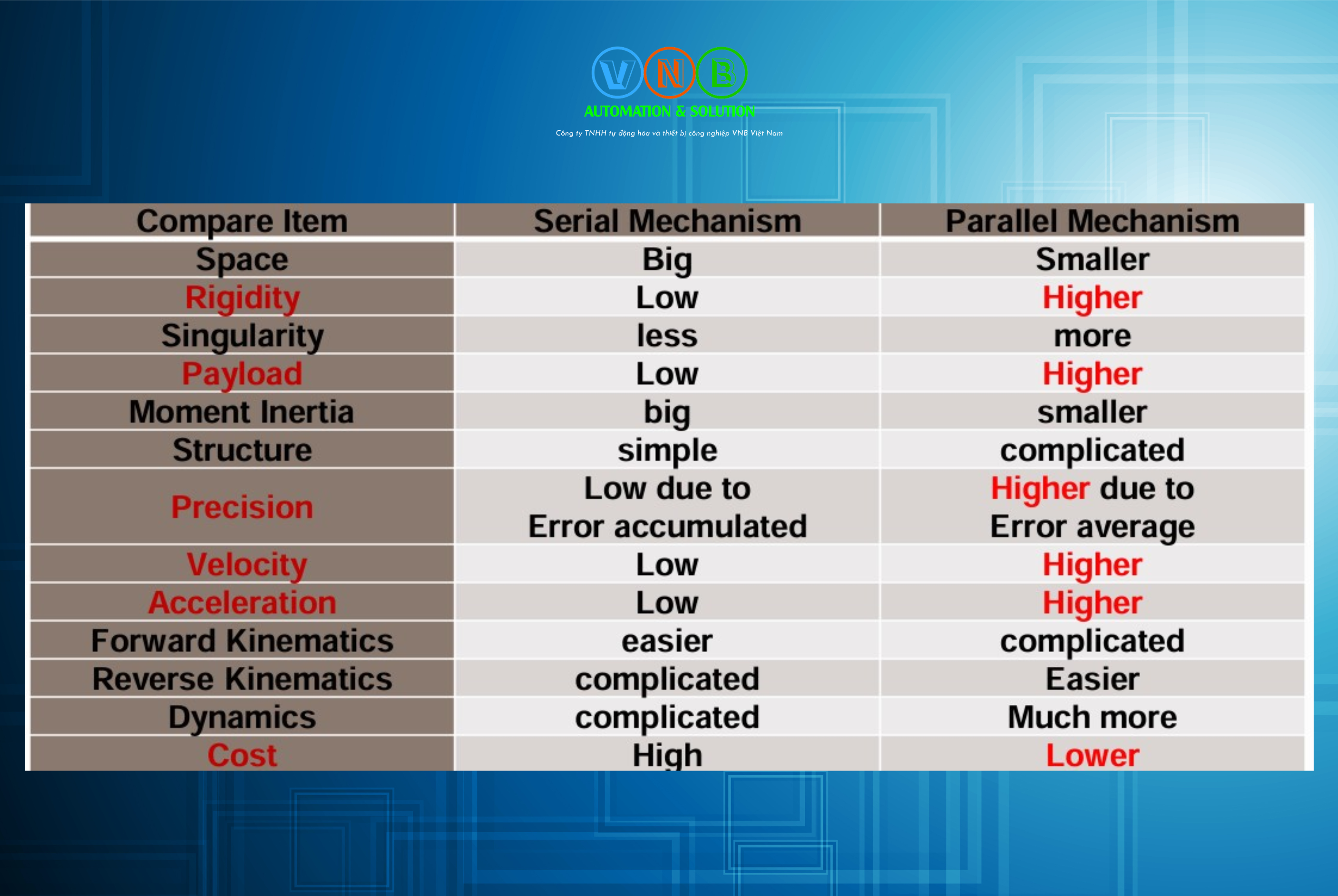
Ưu điểm của cơ chế song song
Kết luận, ưu điểm của nền tảng chuyển động 6DOF bao gồm những mô phỏng phức tạp và thực tế hơn, hoạt động mạnh mẽ hơn và khả năng tải trọng cao hơn.
Nền tảng chuyển động 6DOF bao gồm những mô phỏng phức tạp và thực tế hơn,
hoạt động mạnh mẽ hơn và khả năng tải trọng cao hơn.
Chúng tôi cung cấp những gì để xây dựng nền tảng chuyển động 6DOF?
Hệ thống điều khiển
- Thư viện thuật toán Stewart trong PAC
- Bộ điều khiển chuyển động PAC
- Bộ truyền động và động cơ servo
Xi lanh điện
- Hiệu suất ETH
- XFC lực đẩy cao
Hệ thống thủy lực
- Xi lanh trợ lực
- Van tỷ lệ DFplus
Hệ thống nền tảng chuyển động 6DOF của chúng tôi cung cấp đạt các tiêu chuẩn chất lượng đồng nhất, giải pháp lý tưởng cho những khách hàng kỹ tính đang tìm kiếm hệ thống vận hành trơn tru, không gặp sự cố với chi phí vận hành và bảo trì tối thiểu.
VNB Việt Nam tập trung nghiên cứu sản xuất các hệ thống chuyển động điện có hiệu suất độ chính xác hiệu quả cao, công nghệ ứng dụng rộng rãi trên thế giới.
Theo dõi Fanpage của chúng tôi để cập nhật những thông tin mới nhất: Công Ty TNHH Tự Động Hóa VNB Việt Nam